HOME > PRODUCTS & SERVICES
HOME > PRODUCTS & SERVICES

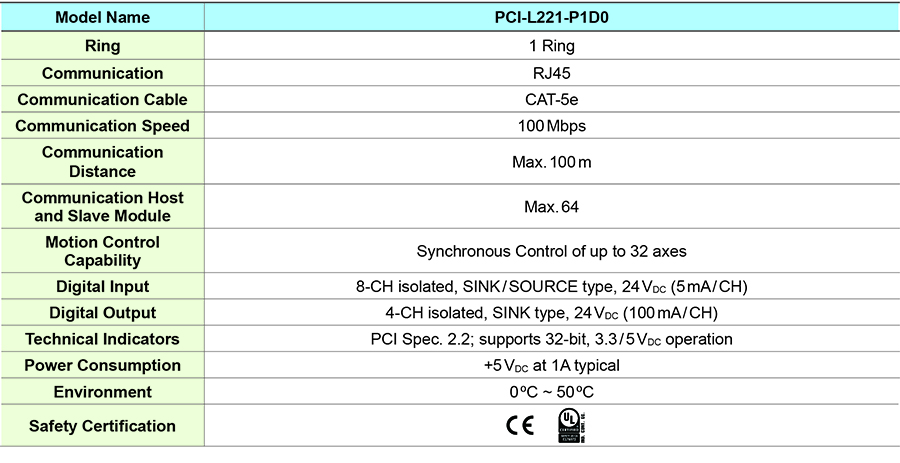
Acts as a EtherCAT master to extend connection with more servo systems and I/O modules and control the whole system more effectively
Controlling up to 64 stations that enable a 32-axis motion control
Communication can be completed by 0.5ms cycle time